三、Hello, TacoAI:运行第一个AI应用
本章节将以官方示例 yolov5_tracker_sample 为例,带用户走通 PC 编译 -> 板载运行 -> 结果呈现 的完整开发闭环。
3.1 编译示例程序 (在 Docker 中)
请确保用户已根据 「TacoAI 应用开发入门」文档的「主机环境配置」章节 的指引进入了 Docker 容器的 bash 终端。
-
进入示例代码目录
cd /tps-sdk-for-mes20/ta-vsp/ta-samples/yolov5_tracker_sample -
创建并进入 build 目录
mkdir -p build && cd build -
使用 cmake 配置工程
cmake ../ -DTARGET_ARCH=soc -DTACO_SDK_SOC=/tps-sdk-for-mes20/ta-vsp/ta-samples/yolov5_tracker_sample/soc240401_riscv64 -DCMAKE_TOOLCHAIN_FILE=/tps-sdk-for-mes20/ta-vsp/ta-samples/yolov5_tracker_sample/toolchain.cmake -
执行编译
make
编译成功后,可执行文件 yolov5_tracker_sample 会生成在 samples/build/ 目录下。
3.2 部署与运行 (在开发板上)
-
拷贝文件
将主机 Docker 容器内的整个
build/目录 (路径为/tps-sdk-for-mes20/ta-vsp/ta-samples/yolov5_tracker_sample/samples/build/) 复制到开发板的任意位置(例如/root)。用户可以使用scp命令来完成。 -
运行程序
在开发板的终端中,进入用户拷贝的
build目录,并运行程序。# (如果需要) 赋予执行权限
chmod +x ./yolov5_tracker_sample
# 运行程序,以本地视频文件为例
./yolov5_tracker_sample ./demo_video.mp4💡 提示:
- 不带参数运行
./yolov5_tracker_sample将会显示用法说明,程序同时支持本地视频文件和网络视频流 URL 作为输入。
- 不带参数运行
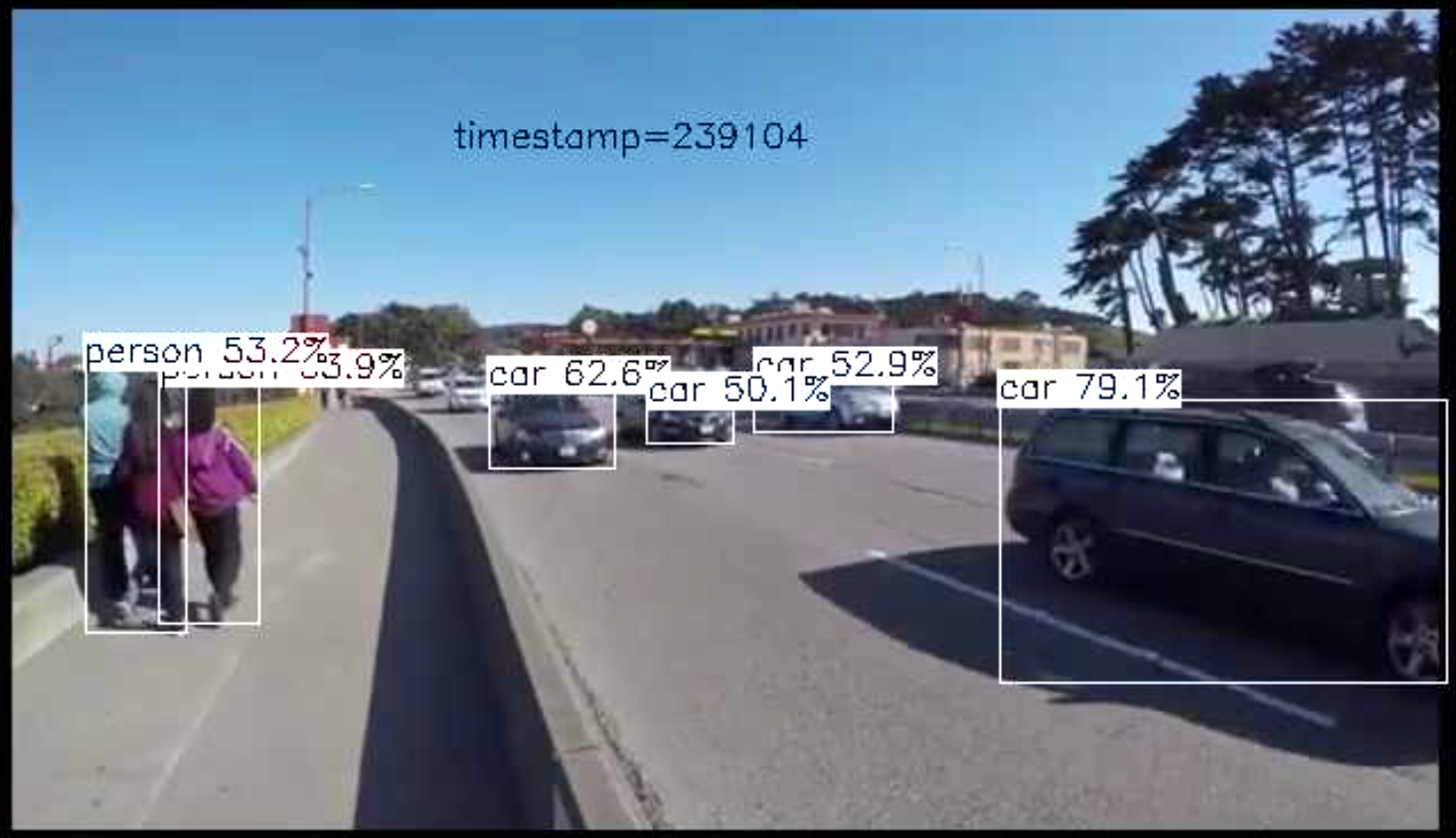
3.3 查看结果 (RTSP 推流)
程序成功运行后,会启动 RTSP 服务,将带有 AI 标注的视频画面实时推流。
-
推流地址:
rtsp://<DEVELOPMENT_BOARD_IP>:8554/0📝 注意:
- 请将
<DEVELOPMENT_BOARD_IP>替换为用户开发板的实际 IP 地址。
- 请将
-
查看方式
在用户的电脑或手机上,使用支持 RTSP 的播放器 (如 VLC Media Player, PotPlayer 等) 打开上述网络串流地址,即可观看到实时检测画面。
3.4 退出程序
程序一旦运行,只能通过强制关闭,来实现退出程序的效果。
-
强制关闭
📝 注意:
- 用户可以手动执行 CTRL + C ,强制关闭此程序。
- 关闭过程中出现
[error] Error sending a packet for decoding这种错误提示,属于正常行为,可以忽略。